Sina-flex data mining for kinematic calibration
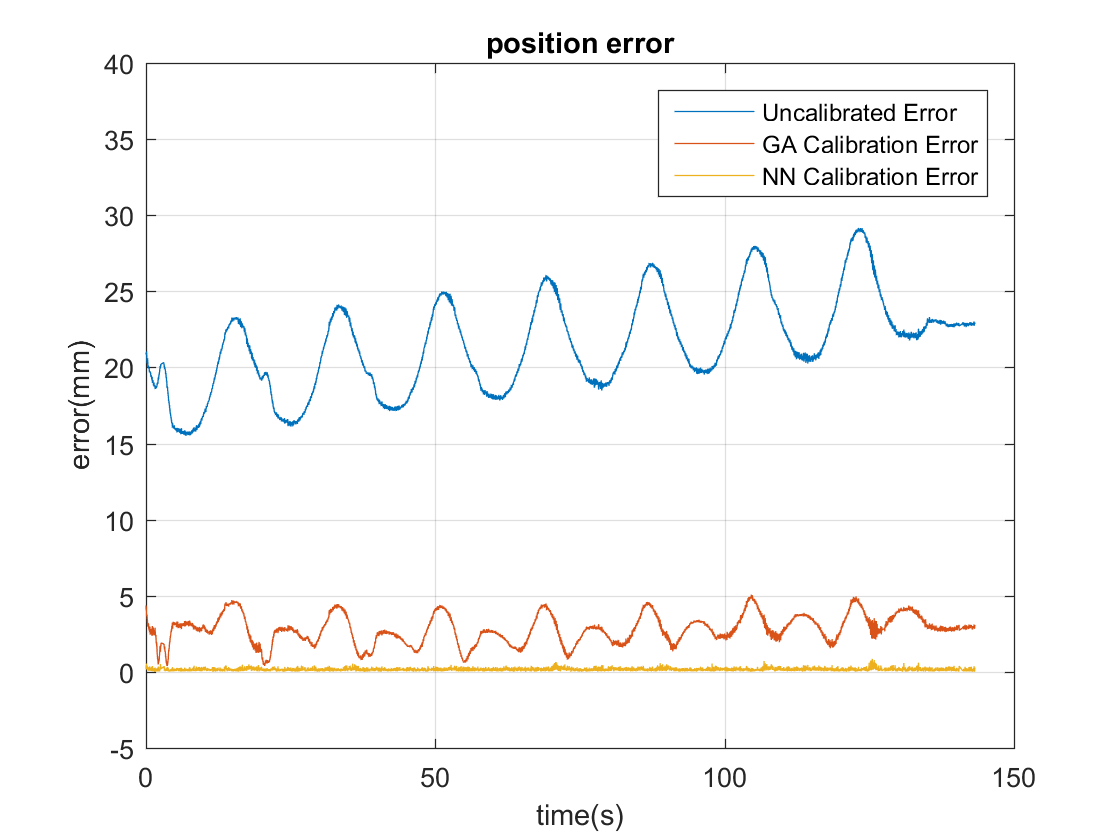
The reason for using both Genetic Algorithms and Neural Networks was to investigate the behavior of the system after calibration in different ways. Optimization is a model-depended. However, Neural Networks is a model-independent. In the genetic method, the goal is to update the DH parameters, although in the Neural Network, the goal is only to find a relation between inputs and outputs.
The test was performed in four steps. The first step was the calibration of the first three serial DOF, the second step was the calibration of the parallel part of the robot known as the agile eye, the third part was the laparoscopic tool calibration alone ,and last, the overall performance of the robot after the separate calibration of each part was checked. In the end, the inverse kinematics of the robot must also be computed, which can also be found by the neural network and partial derivation method.
Results were impressive and precision enhanced more than 90 percent. Results of this project will be published soon.